
Profiler(Benchmarker): Scope of support
Compatible model
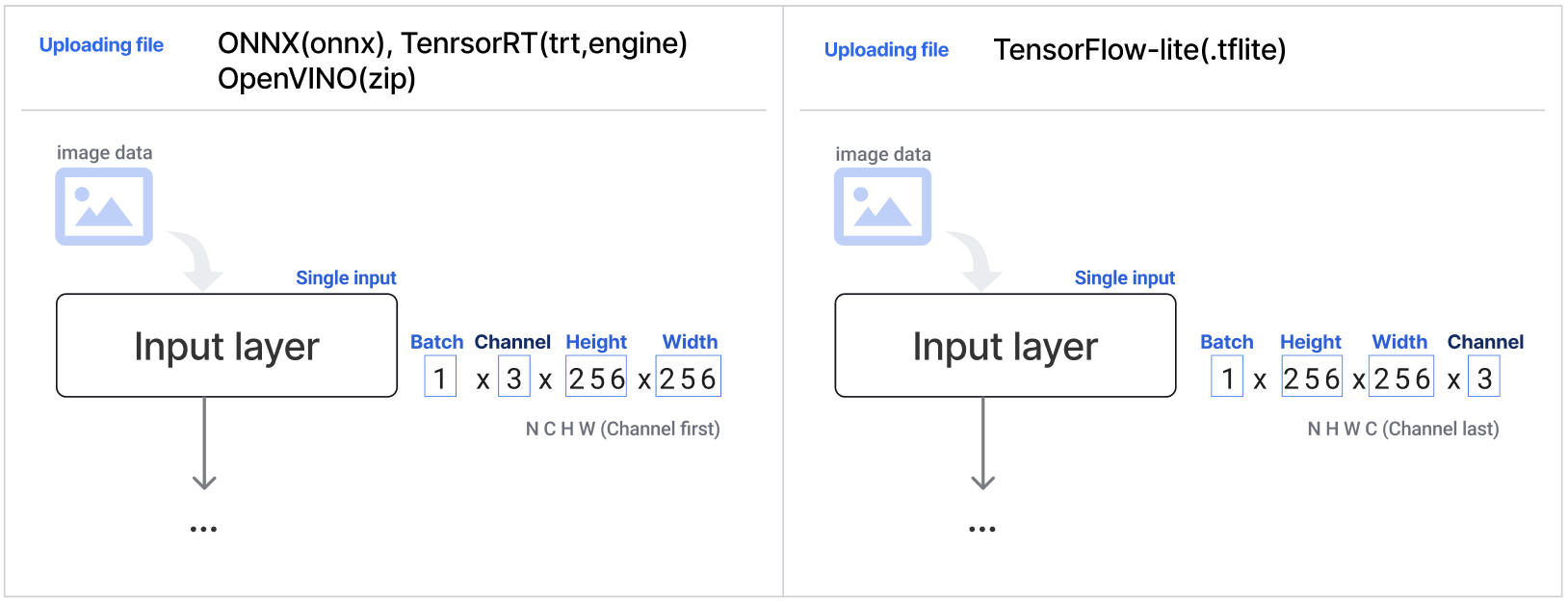
Only single-input models are supported.
The four-dimensional array structure of images should be organized Batch, Number of Channels, Height, and Width.
- Batch size: The number of combined input datasets that the model processes simultaneously.
- Channel: 3 for RGB or BGR and 1 for Grayscale.
- Input size: In computer vision tasks, input size refers to the size of the input images.
Supported Hardware
Arm MCU/NPU
| Target Device | .tflite |
|---|---|
| Renesas RA8D1 (Arm Cortex-M85) | O (only INT8) |
| Renesas RA8D1 (Arm Cortex-M85) with helium | O (only INT8) |
| Alif Ensemble DevKit-E7 Gen2 (Arm Cortex-M55 + Ethos-U55) | O (only INT8) |
| Alif Ensemble DevKit-E7 Gen2 (Arm Cortex-M55 + Ethos-U55) with helium | O (only INT8) |
| Arm Virtual Hardware Corstone-300(Ethos-U55/U65) | O (only INT8) |
| Arduino Nicla Vision(Arm Cortex-M7/M4) | O (only INT8) |
| NXP i.MX 93(Arm Cortex-A55/M33+Ethos-U65) | O (only INT8) |
NVIDIA
- When benchmarking on Jetson, it is essential for the model file and target device to match the Jetpack version.
| Target Device | .trt | .engine | .tflite | .onnx |
|---|---|---|---|---|
| Jetson Nano JetPack 4.4.1 | O | O | X | O |
| Jetson Nano JetPack 4.6 | O | O | X | O |
| Jetson Xavier NX JetPack 4.6 | O | O | X | O |
| Jetson Xavier NX JetPack 5.0.2 | O | O | X | O |
| Jetson TX2 JetPack 4.6 | O | O | X | O |
| Jetson AGX Xavier JetPack 4.6 | O | O | X | O |
| Jetson AGX Orin JetPack 5.0.1 | O | O | X | O |
| Jetson Orin Nano JetPack 6.0 | O | O | X | O |
| AWS-T4 | O | O | X | O |
Raspberry Pi
| Target Device | .tflite | .onnx |
|---|---|---|
| Raspberry Pi ZeroW | O | X |
| Raspberry Pi Zero2W | O | X |
| Raspberry Pi 2B | O | O |
| Raspberry Pi 3B | O | O |
| Raspberry Pi 3B+ | O | O |
| Raspberry Pi 4B | O | O |
| Raspberry Pi 5 | O | O |
Intel
| Target Device | .zip(bin+xml) |
|---|---|
| Xeon W-2223 | O |
Updated 9 months ago
What’s Next